Expert Topic for experienced builders.
Bottango firmware supports direct communication between hardware drivers over low-latency wireless ESP-NOW or wired RS485. This avoids requiring a separate USB connection from the computer to every driver.
You can use first-party Bottango control boards, build your own compatible relay hardware, or mix Bottango control boards and custom hardware in the same project.
One driver in each relay network acts as the bridge. Every other driver in that network is a peer assigned to that bridge.
The bridge receives animation commands from a connected computer or an exported animation source, then routes each command to the appropriate peer. A peer connects to one bridge only, but a Bottango project can contain multiple independent bridge and peer networks.
In this example using Bottango control boards, the bridge serves animations wirelessly from the connected computer to the peer drivers. This is useful when devices are physically distributed or individual USB runs are impractical.

In a Standalone Show Controller configuration, the bridge instead acts as the show controller. Exported animation data and playback logic live on the bridge, giving you one centralized driver for your show files and playback logic.
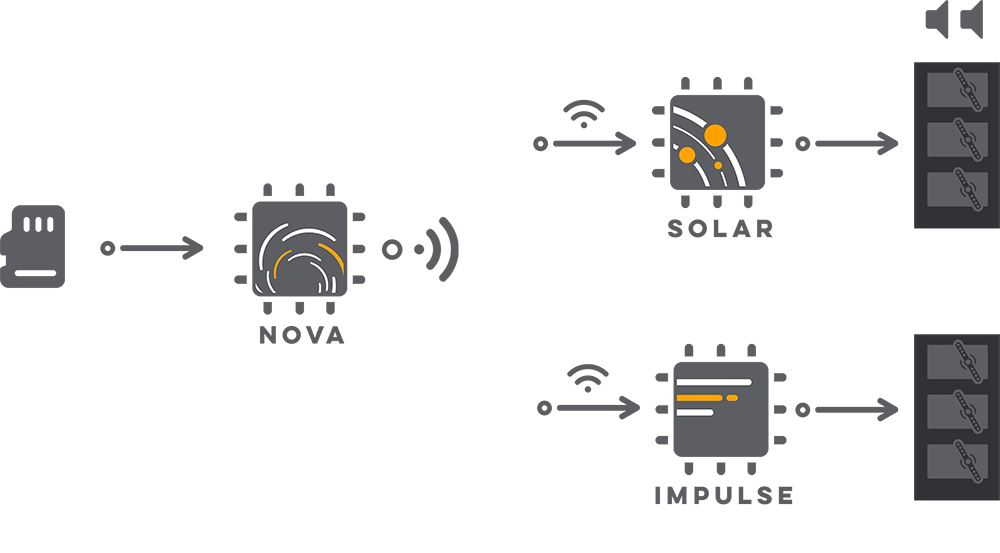
Any compatible device can act as the bridge or as a peer. A bridge can also control effectors attached directly to itself:

Combining bridge duties with local motor control can reduce hardware count. For more demanding networks, a dedicated bridge may provide more predictable processing and communication performance.
Every device needs:
Wireless ESP-NOW relay communication requires ESP32-based microcontrollers.
Wired RS485 requires a compatible transceiver on every device, a correctly wired shared bus, and proper termination. Pin assignments and transceiver control are set in BottangoArduinoConfig.h. The electrical protection and connector design will depend on your custom hardware.
Continue with Wired vs Wireless before configuring your devices.